Mètode d'Euler
En matemàtiques i ciència computacional, el mètode d'Euler és un procés numèric per a resoldre equacions diferencials ordinàries (EDOs) amb un valor inicial donat. És el cas més bàsic de mètode explícit d'integració numèrica per a equacions diferencials ordinàries.[1] El mètode pren el nom de l'autor, Leonhard Euler.[2]
Descripció geomètrica informal
Considerem el problema de trobar una corba desconeguda que comença en un punt donat i satisfà una equació diferencial donada. L'equació diferencial es pot interpretar com una fórmula que permet calcular el pendent de la recta tangent a qualsevol punt de la corba, a partir de la posició d'aquest punt.
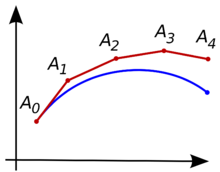
La idea és que, encara que la corba és inicialment desconeguda, el seu punt inicial, que notarem per és conegut (vegeu la il·lustració superior). Llavors, a partir de l'equació diferencial, es pot calcular el pendent de la corba a , i per tant, la recta tangent en el punt inicial.


Avancem un petit pas al llarg d'aquesta recta tangent cap a un punt Si suposem que encara es troba sobre la corba, es pot utilitzar el mateix raonament que pel punt . Després d'alguns passos, es calcula la corba poligonal . En general, aquesta corba no divergeix gaire de la corba original desconeguda, i l'error entre totes dues corbes es pot reduir si la mida del pas és prou petita i l'interval de computació és finit.[3]



Derivació






Volem aproximar la solució del problema de valor inicial:

utilitzant els dos primers termes de la sèrie de Taylor de y, que representa l'aproximació lineal al voltant del punt (t0,y(t0)). Un pas del mètode d'Euler des de tn cap a tn+1 = tn + h és[4]

El mètode d'Euler és explícit, és a dir, la solució és una funció explícita de per .



Encara que el mètode d'Euler integra una EDO de primer ordre, qualsevol EDO d'ordre es pot representar com una EDO de primer ordre amb més d'una variable introduint variables addicionals, , , ..., , i formulant equacions de primer grau amb aquestes noves variables.[5] El mètode d'Euler es pot aplicar al vector per integrar el sistema d'ordre més elevat.[3]






Error
La magnitud dels errors generats pel mètode d'Euler es pot demostrar per comparació amb una sèrie de Taylor de y.[3] Si assumim que i es coneixen exactament al temps llavors el mètode d'Euler dona la solució aproximada al temps com:





(la segona igualtat prové que y satisfà l'equació diferencial ). En comparació, la sèrie de Taylor a sobre dona:




L'error introduït pel mètode d'Euler ve donat per la diferència entre aquestes equacions:

Per petita, l'error dominant per pas és proporcional a . Per resoldre el problema sobre un rang donat de , el nombre de passos necessaris és proporcional a , per tant s'espera que l'error total al final del temps fixat sigui proporcional a (error per pas multiplicat pel nombre de passos). Per aquesta raó, es diu que el mètode d'Euler és de primer ordre.[2] Això fa que el mètode d'Euler sigui menys precís (per petites ) que altres tècniques d'ordres més alts com els mètodes de Runge-Kutta.



El mètode d'Euler també pot ser numèricament inestable. Aquesta limitació, juntament amb la seva lentitud en la convergència, fa que el mètode d'Euler no sigui gaire utilitzat, excepte com a exemple simple d'integració numèrica.[7]
Referències
- ↑ Ascher, Uri M.; Petzold, Linda R. Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations. Philadelphia: Society for Industrial and Applied Mathematics, 1998. ISBN 978-0-89871-412-8.
- ↑ 2,0 2,1 2,2 Butcher, John C. Numerical Methods for Ordinary Differential Equations. Nova York: John Wiley & Sons, 2003. ISBN 978-0-471-96758-3.
- ↑ 3,0 3,1 3,2 Atkinson, Kendall A. An Introduction to Numerical Analysis. Segona edició. Nova York: John Wiley & Sons, 1989, p. 342-346. ISBN 978-0-471-50023-0.
- ↑ Greenberg, Michael D. Advanced Engineering Mathematics (en anglès). 2a. Upper Saddle River, Nova Jersey: Prentice Hall, 1998, p. 293. ISBN 0-13-321431-1.
- ↑ Stoer, Josef; Bulirsch, Roland. Introduction to Numerical Analysis. Tercera edició. Berlin, New York: Springer-Verlag, 2002, p. 474. ISBN 978-0-387-95452-3.
- ↑ Hairer, Ernst; Nørsett, Syvert Paul; Wanner, Gerhard. Solving ordinary differential equations I: Nonstiff problems. Berlin, New York: Springer-Verlag, 1993, p. 35-36. ISBN 978-3-540-56670-0.
- ↑ Iserles, Arieh. A First Course in the Numerical Analysis of Differential Equations. Cambridge University Press, 1996, p. 7. ISBN 978-0-521-55655-2.
