Equació lineal
En matemàtiques, una equació lineal és una equació que pot presentar-se en la forma

on són les variables (o incògnites), i són els coeficients, que sovint són nombres reals. Els coeficients poden considerar-se com a paràmetres de l'equació i poden ser expressions arbitràries, sempre que no continguin cap de les variables. Per obtenir una equació significativa, cap dels coeficients siguin zero.



Alternativament, es pot obtenir una equació lineal igualant a zero un polinomi lineal sobre algun cos, a partir del qual es prenen els coeficients.
Les solucions d'una equació d'aquest tipus són els valors que, quan se substitueixen per les incògnites, fan realitat la igualtat.
En el cas d'una sola variable, hi ha exactament una solució (sempre que ). Sovint, el terme equació lineal fa referència implícita a aquest cas concret, en el qual la variable s'anomena desconeguda.

En el cas de dues variables, cada solució es pot interpretar com a coordenades cartesianes d'un punt del pla euclidià. Les solucions d'una equació lineal formen una línia recta en el pla euclidià i, per contra, es pot veure a cada línia recta com el conjunt de totes les solucions d'una equació lineal amb dues variables. Aquest és l'origen del terme «lineal» per descriure aquest tipus d'equacions. Més generalment, les solucions d'una equació lineal amb n variables formen un hiperplà (un subespai de dimensió n − 1) a l'espai euclidià de la dimensió n.
Les equacions lineals es produeixen freqüentment en matemàtiques i en totes les seves aplicacions en física i enginyeria, en part perquè els sistemes no lineals solen ser ben aproximats per equacions lineals.
Aquest article considera el cas d'una única equació amb coeficients del cos de nombres reals, per a la qual s'estudia les solucions reals. Tot el seu contingut s'aplica a solucions complexes i, més generalment, a equacions lineals amb coeficients i solucions en qualsevol cos. Per al cas de diverses equacions lineals simultànies, vegeu sistema d'equacions lineals.
Una variable
Sovint, el terme equació lineal es refereix implícitament al cas d'una sola variable.
En aquest cas, l'equació es pot expressar en la forma

i té una solució única

en el cas general on a ≠ 0. En aquest cas, es dona el nom de desconegut a la variable x.
Si a = 0, hi ha dos casos:
- b = 0, i tots els números són una solució.
- b ≠ 0, i no hi ha solució. En aquest darrer cas, es diu que l'equació és inconsistent.
Dues variables
En el cas de dues variables, qualsevol equació lineal es pot expressar en forma

on x i y són les variables i a, b i c són els coeficients.
Una equació equivalent (és a dir una equació amb exactament les mateixes solucions) és

amb A = a, B = b, i C = –c
A aquestes variants equivalents se'ls dona de vegades noms genèrics, com forma general o forma estàndard.[1]
Hi ha altres formes d'equació lineal (vegeu més avall), que es poden transformar en la forma estàndard amb manipulacions algebraiques simples, com ara afegir la mateixa quantitat als dos membres de l'equació o multiplicar els dos membres per la mateixa constant no-zero.
Funció lineal
Si b ≠ 0, l'equació

és una equació lineal amb una única variable y per a cada valor de x. Per tant, té una solució única per a y, que ve donada per

Això defineix una funció. La gràfica d'aquesta funció és una línia recta amb pendent i intercepció vertical (intercepció y) Les funcions que la seva gràfica és una línia recta s'anomenen generalment funcions lineals en el context del càlcul. Tanmateix, en l'àlgebra lineal, una funció lineal és una funció que assigna una suma a la suma de les imatges dels sumands. Així doncs, per a aquesta definició, la funció anterior només és lineal quan c = 0, és a dir, quan la línia recta passa per l'origen. Per evitar confusions, les funcions que la seva gràfica és una línia arbitrària sovint s'anomenen funcions afines.


Interpretació geomètrica

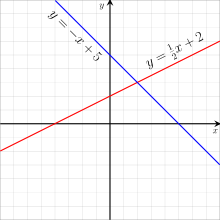
Cada solució (x, y) d'una equació lineal
es pot considerar com les coordenades cartesianes d'un punt del pla euclidià. Amb aquesta interpretació, totes les solucions de l'equació formen una línea recta, sempre que a i b no siguin totes dues zero. Per contra, cada línia recta és el conjunt de totes les solucions d'una equació lineal.
L'expressió «equació lineal» té el seu origen en aquesta correspondència entre línies i equacions: una equació lineal amb dues variables és una equació les solucions de les quals formen una línia recta.
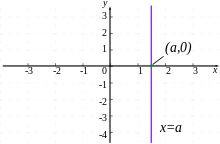
Si b ≠ 0, la línia recta és la gràfica de la funció x que s'ha definit a la secció anterior. Si b = 0, la línia recta és una línia vertical (és a dir una línia paral·lela a l'eix Y) de l'equació que no és la gràfica d'una funció de x.

De la mateixa manera, si a ≠ 0, la línia recta és la gràfica d'una funció de y, i, si a = 0, una té una línia recta horitzontal d'equació

Equació d'una recta
Hi ha diverses maneres de definir una recta. En els subapartats següents, es dona una equació lineal d'una recta per a cada cas.
Forma de punt-intercepció
Una recta no-vertical es pot definir pel seu pendent m, i la seva intercepció vertical (intercepció y) y0 (la coordenada y de la seva intersecció amb l'eix Y). En aquest cas es pot escriure la seva equació lineal

Si, a més, la recta no és horitzontal, es pot definir pel seu pendent i la seva intercepció horitzontal (intercepció x) x0. En aquest cas, la seva equació es pot escriure

o, de manera equivalent,

Aquestes formes es basen en l'hàbit de considerar una recta no-vertical com la gràfica d'una funció.[2] Per a una recta donada per una equació
aquestes formes es poden deduir fàcilment de les relacions

Forma de punt-pendent
Una recta no-vertical es pot definir pel seu pendent m i les coordenades de qualsevol punt de la línia recta. En aquest cas, una equació lineal de la recta és


o

Aquesta equació també es pot escriure

per emfatitzar que el pendent d'una línia es pot calcular a partir de les coordenades de qualsevol dels dos punts.
Forma d'intercepció
Una recta que no és paral·lela a un eix i que no passa per l'origen talla els eixos en dos punts diferents. Els valors d'intercepció x0 i y0 d'aquests dos punts són no-zero, i una equació de la recta és:[3]

(És fàcil verificar que la recta definida per aquesta equació té com a valors d'intercepció x0 i y0).
Forma de dos punts
Tenint en compte dos punts diferents (x1, y1) i (x2, y2), hi ha exactament una recta que els passa. Hi ha diverses maneres d'escriure una equació lineal d'aquesta recta.
Si x1 ≠ x2, el pendent de la recta és Llavors, la forma de punt-pendent és[3]


Netejant els denominadors, s'obté l'equació

que és vàlid també quan x1 = x2 (per comprovar-ho, n'hi ha prou de comprovar que els dos punts donats satisfan l'equació).
Aquesta forma no és simètrica en els dos punts donats, però es pot obtenir una forma simètrica agrupant els termes constants:

(intercanviant els dos punts canvia el signe del costat esquerre de l'equació).
Foma de determinant
La forma de dos punts de l'equació d'una recta es pot expressar simplement en termes d'un determinant. Hi ha dues formes per aconseguir-ho.
L'equació és el resultat d'expandir el determinant en l'equació


L'equació es pot obtenir expandint respecte a la seva primera fila el determinant de l'equació

A banda de ser molt senzilla i mnemotècnica, aquesta forma té l'avantatge de ser un cas especial de l'equació més general d'un hiperplà que passa per n punts en un espai de dimensió n-1. Aquestes equacions es basen en la condició de dependència lineal dels punts en un espai projectiu.
Més de dues variables
Una equació lineal amb dues o més variables sempre pot suposar que té la forma

El coeficient b, sovint denotat a0, es denomina terme constant (de vegades el terme absolut). Segons el context, el terme coeficient es pot reservar per ai amb i > 0.
Quan es tracten variables, és habitual utilitzar i en lloc de variables indexades.



Una solució d'aquesta equació és una n-tupla tal que la substitució de cada element de la tupla per la variable corresponent transforma l'equació en una veritable igualtat.
Perquè una equació tingui sentit, el coeficient d'almenys una variable ha de ser diferent de zero. De fet, si cada variable té un coeficient zero, llavors, com s'ha esmentat per a una variable, l'equació és inconsistent (per b ≠ 0), com que no té solució, o totes les n-tuples són solucions.
Les n-tuples que són solucions d'una equació lineal amb n variables són les coordenades cartesianes dels punts d'un (n - 1)-hiperplà dimensional en un espai euclidià n-dimensional (o espai afí si els coeficients són nombres complexos o pertanyen a qualsevol camp). En el cas de tres variables, aquest hiperplà és un pla.
Si es dona una equació lineal amb aj ≠ 0, llavors l'equació es pot resoldre per xj, produint-se

Si els coeficients són nombres reals, això defineix una funció de valors reals de n variables reals.
En equacions diferencials
Aquí es parlarà de funcions definides sobre ℝ o sobre ℂ amb valors a ℝ o a ℂ.
Una equació diferencial lineal del primer ordre de y desconeguda és una equació de la forma

on a, b i c són les funcions numèriques.
Una equació diferencial lineal d'ordre n i de la incògnita y és una equació de la forma

on a0, a1, …, an i an + 1 són les funcions numèriques i y(k) la derivada d'ordre k de y.
Si a0, a1, …, an i an + 1 són les constants, s'anomena equació lineal amb coeficients constants.
El cas de les equacions diferencials lineals homogènies
Si an + 1 = 0, l'equació diferencial lineal s'anomena equació diferencial lineal homogènia.
Per exemple, : és una equació diferencial lineal homogènia amb coeficients constants.

Si y1 i y₂ són solucions d'una equació diferencial lineal homogènia, per la qual cosa és el mateix ky1 i de y1 + y₂ ;
Si coneixem una solució particular d'una equació diferencial lineal, la solució general es forma mitjançant la suma d'aquesta solució particular amb la solució general de l'equació lineal homogènia associada.
Aplicacions
Les equacions lineals amb coeficients reals són les equacions més simples tant per expressar com per resoldre. Per tant, tenen interès en la pedagogia de les matemàtiques, per ensenyar la implementació del mètode de resolució general: aplicar una equació, aplicació d'un mètode de resolució.
Des d'un punt de vista concret, un cert nombre de fenòmens físics es poden modelar mitjançant una llei lineal (o llei proporcional). Una equació lineal és l'expressió d'un problema el fenomen del qual pot ser modelat per tal llei.
A més, les lleis més complexes poden adoptar una forma lineal:
- o bé transformant-la per una funció o bé canviant la variable; per exemple, una equació amb potències y = Kxn (on K i n són constants) es transforma en una llei lineal per l'aplicació del logaritme, ln y = ln K + n ln x ;
- ja sigui per linealització, per exemple per un desenvolupament limitat de primer ordre.
Referències
- ↑ Barnett, Ziegler i Byleen, 2008, p. 15.
- ↑ Larson i Hostetler, 2007, p. 25.
- ↑ 3,0 3,1 Wilson i Tracey, 1925, p. 52-53.
Bibliografia
- Barnett, R.A.; Ziegler, M.R.; Byleen, K.E.. College Mathematics for Business, Economics, Life Sciences and the Social Sciences (en anglès). Upper Saddle River, N.J.: Pearson, 2008. ISBN 0-13-157225-3.
- Ron, Larson; Hostetler, Robert. Precalculus:A Concise Course (en anglès). Houghton Mifflin, 2007. ISBN 978-0-618-62719-6.
- Wilson, W.A.; Tracey, J.I.. Analytic Geometry. revised. D.C. Heath, 1925.
